- Security solution
 Commercial vehicles and passenger vehicles
Commercial vehicles and passenger vehicles Construction and road construction
Construction and road construction Fire and EMS
Fire and EMS Law enforcement and military
Law enforcement and military - Vehicle
- Products
- About us
- News
- Video Center
- Contact us




Introduction to Smart Cockpit and Advanced Driver Assistance System ADAS
Advanced Driving Assistant System (ADAS) refers to the use of various types of sensors installed in the vehicle (LIDAR, camera, millimeter wave radar, ultrasonic radar, and GPS, etc.), real-time sensing of the vehicle’s surroundings in the process of automobile driving, recognizing lane lines, traffic lights, road signs, pedestrians in the environment, other vehicles, etc., and recognizes, tracks, and predicts static or dynamic obstacles, combining with the vehicle’s current motion information for decision-making planning.
When a possible danger is detected, the driver is warned or certain actions are taken in time, thus effectively increasing the safety of automobile driving.
It is important to note that ADAS systems do not fully control the car for autonomous driving; they partially replace the driver in maneuvering the car when the driver is unable to react correctly to an emergency or when traffic conditions are very simple.ADAS systems are not autonomous driving systems and cannot fully replace the driver in driving the car.
The introduction of the ADAS system reduces the driver’s operational burden, makes up for the shortcomings of the driver’s insufficient decision-making and maneuvering ability, and improves the active safety of vehicle driving.
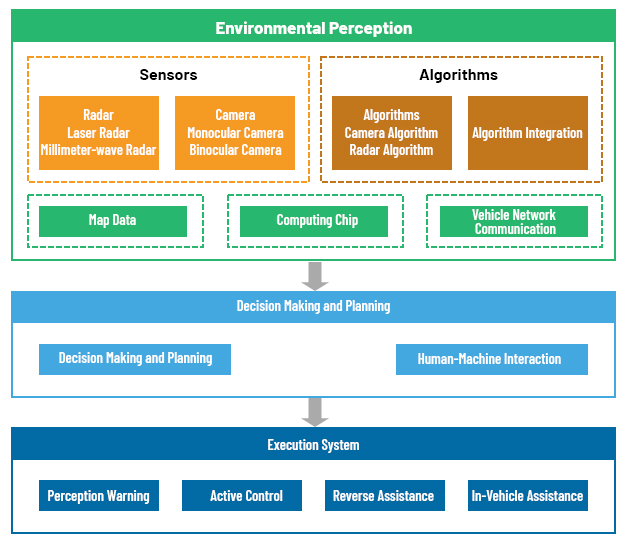
ADAS Algorithmic Architecture
ADAS technology
Sensing technologies: including LiDAR, vision sensors (e.g. cameras), ultrasonic sensors, etc., which are used to collect information about the surrounding environment.
Positioning technology: including GPS, on-board cameras, base station signals, etc., used to determine the vehicle’s position on the map.
Control technology: including on-board computer, control unit, drive motor, etc., which is used to control the vehicle according to the sensing information and positioning information.
Human-computer interaction technologies: including voice recognition, text recognition, gesture recognition, etc., which are used to provide information to and receive instructions from the driver.
AI learning technologies: including machine learning, deep learning, etc., which are used to help vehicles learn and optimize their driving decisions.
Basic functions and implementation of ADAS
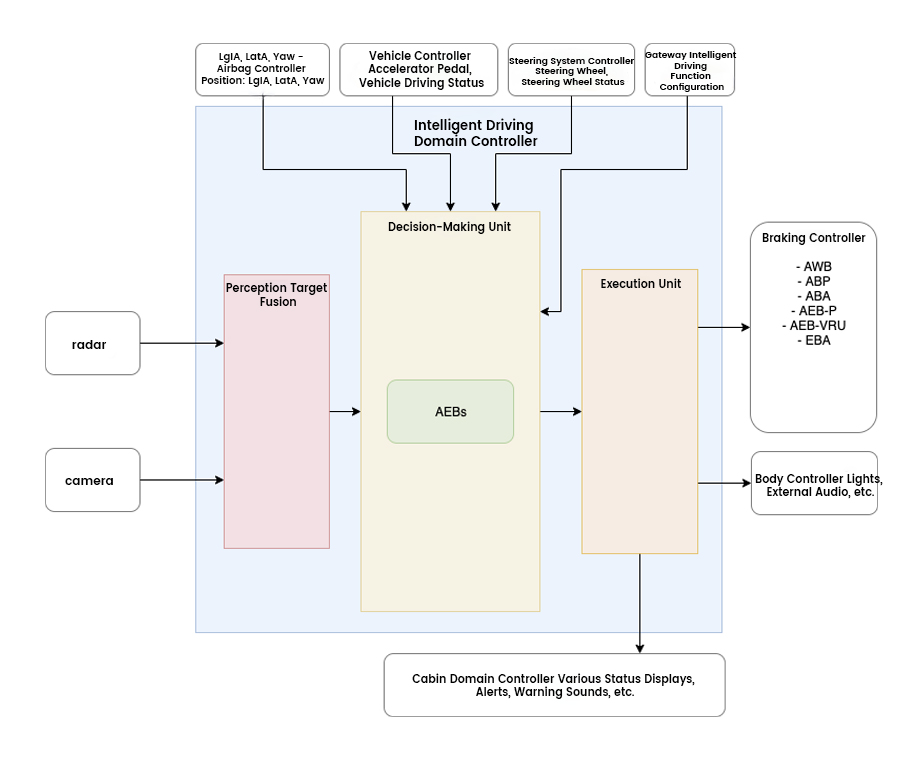
The realization of ADAS is very similar to the mechanism of the human body’s response to external information. The system consists of three parts: the perception layer (radar, camera, V2X communication, precise positioning, etc.), the cognition and judgment layer (control unit and decision-making unit), and the execution layer (brake and throttle, electronic stability system, electric power steering, automatic transmission, etc.).
From ADAS technology can be divided into two categories: control assistance and information assistance:
ADAS control assistance class technology
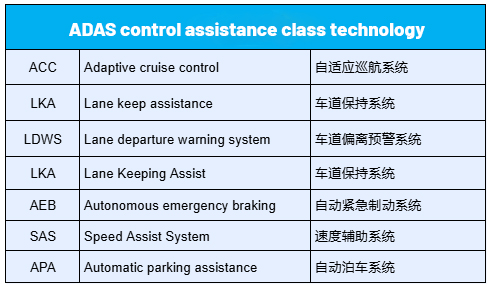
Adaptive Cruise Control (ACC)
Adaptive cruise control is an intelligent automatic control system that builds on long-standing cruise control technology.
During vehicle driving, the distance sensor (radar) installed in the front of the vehicle continuously scans the road in front of the vehicle, and the wheel speed sensor collects the vehicle speed signal. When the distance between the vehicle and the front is too small, the ACC control unit can coordinate the action with the brake ABS system and engine control system to make the wheels brake appropriately and make the engine output power drop, so as to make the vehicle and the vehicle in front of it always keep a safe distance.
LKA(Lane Keeping Assist)
It accurately senses and calculates the exact position and dynamic information of the vehicle in the lane through sensing devices such as cameras. The system further utilizes the vehicle’s steering and braking systems to maneuver the vehicle, aiming to prevent traffic accidents caused by vehicles drifting out of their lanes.
Once it detects signs of lane departure, the system fine-tunes the vehicle’s steering to ensure that it can safely return to its original lane and continue driving.LKA is implemented by using sensors to detect the vehicle’s position and direction of travel, and then adjusting the vehicle’s direction according to the position of the lane line and the vehicle’s driving conditions.
LDWS( Lane departure warning system)
Lane Departure Warning System means: when driving without a turn signal suddenly and drastically deviates from the lane and drifts abnormally, once the CarLog determines that there is a difference in the driving route, it will alert the driver with the CarLog’s display screen and sound an audible warning to alert the driver. This will allow the driver to take immediate action to return to the original lane of travel.
LKA(Lane Keeping Assist)
Lane Keeping Assist, which accurately senses and calculates the exact position and dynamic information of the vehicle in the lane through sensing devices such as cameras. The system further utilizes the vehicle’s steering and braking systems to maneuver the vehicle with the aim of preventing traffic accidents caused by vehicles drifting out of their lanes.
Once the vehicle is detected to have drifted out of the lane, the system will fine-tune the steering of the vehicle to ensure that it can safely return to its original lane and continue traveling.
AEB(Autonomous Emergency Braking System)
The automatic emergency braking system uses radar to measure the distance to the vehicle in front or obstacles, and then uses the data analysis module to compare the measured distance with the alarm distance and safety distance. When the distance is less than the alarm distance, the alarm will be prompted, and when the distance is less than the safety distance, even if the driver doesn’t have time to step on the brake pedal, the AEB system will be activated, so that the car will brake automatically, thus protecting the safety of traveling.
It consists of three main modules, including the control module (ECU), distance measurement module, and braking module. The core of the distance measuring block includes microwave radar, face recognition technology and video system, which can provide safe, accurate and real-time image and road condition information of the road ahead.
SAS(Speed Assist System)
Speed assist systems are designed to help drivers maintain a safe speed of the vehicle. Through the vehicle’s sensors and cameras to monitor the vehicle’s speed and road speed limit information and through sound and light information to inform the driver, according to the speed limit information for speeding alarms and the ability to actively intervene to control the speed, so that the speed of the vehicle to hold within the allowable high limit, which reduces the risk.
APA(Automatic Parking Assist)
The automatic parking system utilizes on-board sensors (generally ultrasonic radar or camera) to identify effective parking spaces and control the vehicle to park through the control unit. Compared with traditional reversing assistance functions, such as reversing camera and reversing radar, the function of automatic parking is more intelligent and effectively reduces the driver’s difficulty in reversing.
The fully automatic parking assistance system, APA, automatically parks the vehicle by controlling the vehicle’s acceleration and deceleration speed and steering angle. The system senses the parking environment through AVM (surround view) and USS (ultrasonic radar), estimates the vehicle attitude (position and direction of travel) using the IMU and wheel sensors, and sets the target parking space automatically or manually according to the driver’s choice.
The system then calculates the automatic parking trajectory and through precise vehicle positioning and vehicle control system, the vehicle is fully automated along the defined parking trajectory until it reaches the final target parking space.
Processes required for ADAS to perform tasks
ADAS performs the tasks required when the whole process: perception, judgment, execution of three steps, by the sensor, electronic control unit (ECU) and actuator three major components, through the electronic control unit to monitor the car’s operating status, the vehicle’s engine and braking system for intervention control.
Typical automotive electronic stability control system in the sensor mainly includes four wheel speed sensors, steering wheel angle sensors, lateral acceleration sensors, pendulum angular velocity sensors, brake master cylinder pressure sensors, etc., and the executive part includes the traditional braking system (vacuum booster, piping and brake), hydraulic regulator, etc., and the electronic control unit and the engine management system linked to engine power output can be The electronic control unit is linked to the engine management system to intervene and adjust the engine power output.
Perceptual
Unlike human beings who have five senses, cars rely on various types of sensors to sense environmental data. The more sensors a car has, the more information it can gather.
Unlike human beings who have five senses, automobiles rely on various types of sensors to perceive environmental data. The more sensors a car carries, the more information it can collect.
Most ADAS adopt camera + radar combination to realize the complementary functions of radar ranging and camera image recognition. Active and passive infrared night vision systems are two mainstream technology routes. The active type accepts the corresponding sensitive spectrum imaging reflected by the object through the CCD, while the passive type of infrared focal plane detector accepts the infrared radiation imaging of the object. Both have their own advantages and will coexist for a longer period of time.
Judgements
While sensors allow cars to perceive like humans, the core soul that allows cars to make judgments is the algorithm. Based on input data such as sensors, the trip computer can take over the driver’s initiative to issue commands for control.
Algorithms are the decisive factor in the reliability and accuracy of the ADAS system, which mainly includes camera/radar ranging, pedestrian recognition, road traffic sign recognition, etc. The reliability requirements for front-loading applications are high, and a large number of scenarios need to be tested and calibrated. Among them, the threshold of radar calibration is the highest.
Fulfillment
The ADAS system acquires data through sensors, and after the main chip completes its judgment, the primary application alerts the driver through sound, image, and vibration. When combined with electronic control functions, it gradually evolves to automatic control of the vehicle.
Introduction to ADAS Controllers
An ADAS controller is an electronic control unit (ECU) for advanced driver assistance systems (ADAS) that integrates and processes data from different sensors (e.g., camera, radar, LIDAR, etc.) to enable a variety of safe and automated driving functions.
The ADAS controller is a centralized architecture that replaces traditional distributed architectures, reducing system complexity, cost, and power consumption, and improving system performance, scalability, and functional safety.
ADAS controllers are usually designed for L2 or L3 level autonomous driving needs and require high-speed communication, high-capacity storage, powerful computing capabilities and flexible software platforms .
ADAS controllers enable a variety of segmented functions such as adaptive cruise control (ACC), 360-degree panoramic video (AVM), automatic emergency braking (AEB), forward collision warning (FCW), lane departure warning (LDW), blind spot detection (BSD), fatigue driving warning (DFMS), automated parking (APA), lane keeping assist (LKA), traffic sign Recognition (TSR), Remote Summon, Night Vision (NV), Pedestrian Detection System (PDS), and so on.
- A Comprehensive Overview of the Evolution of Parking Assistance Systems2025-07-10
- Revolutionize Your Vision: Next-Gen Wireless Camera Systems & Forklift Safety Solutions Launched2025-07-08
- Smart Cockpit ADAS Core Technology Architecture and Safety System Evolution2025-04-21
- Intelligent Cockpit ADAS and HUD Convergence System Design2025-04-18
- AI Camera Systems: Revolutionary Technology for the Trucking Industry2025-02-12
- Smart Cockpit HMI Design and Driving Safety2025-01-17