- Security solution
 Commercial vehicles and passenger vehicles
Commercial vehicles and passenger vehicles Construction and road construction
Construction and road construction Fire and EMS
Fire and EMS Law enforcement and military
Law enforcement and military - Vehicle
- Products
- About us
- News
- Video Center
- Contact us




In the process of automotive industry’s transformation towards intelligence and internet connectivity, Advanced Driver Assistance System (ADAS) has become the core technology to enhance road safety and optimize driving experience.
As an important cornerstone of automated driving technology, ADAS significantly reduces the risk of accidents caused by human error by integrating multimodal sensors such as camera, radar, and LIDAR, and combining them with complex algorithms to realize environment sensing, decision support, and control execution.
According to the World Health Organization, road traffic accidents cause about 1.25 million deaths globally every year, and the popularization of ADAS can reduce the accident rate by more than 30%. In this paper, we systematically sort out the core connotation and development of ADAS from the four dimensions of technical architecture, application scenarios, cutting-edge trends and key challenges.
1. Evolution of the security system
Automotive safety systems have undergone a paradigm shift from “passive protection” to “active intervention”. Traditional passive safety systems such as seat belts and airbags focus on post-accident protection, while ADAS realizes the prediction and avoidance of potential risks through real-time environmental monitoring and dynamic decision-making. The technological leap is reflected in three aspects:
Multi-dimensional environmental sensing capability breaks through the human physiological limit, forming an all-round sensing network covering the far, medium and near fields;
Embedded computing platforms such as NVIDIA Orin support millisecond-level data processing, ensuring immediate response to automatic emergency braking, lane keeping and other functions;
Deep learning and massive road test data continuously optimize system robustness, significantly improving target detection accuracy under complex lighting and bad weather, truly realizing the safety concept upgrade of “prevention beforehand”.
2. Core technical architecture analysis
The technical effectiveness of ADAS relies on the synergistic design of the sensing, processing and execution layers.
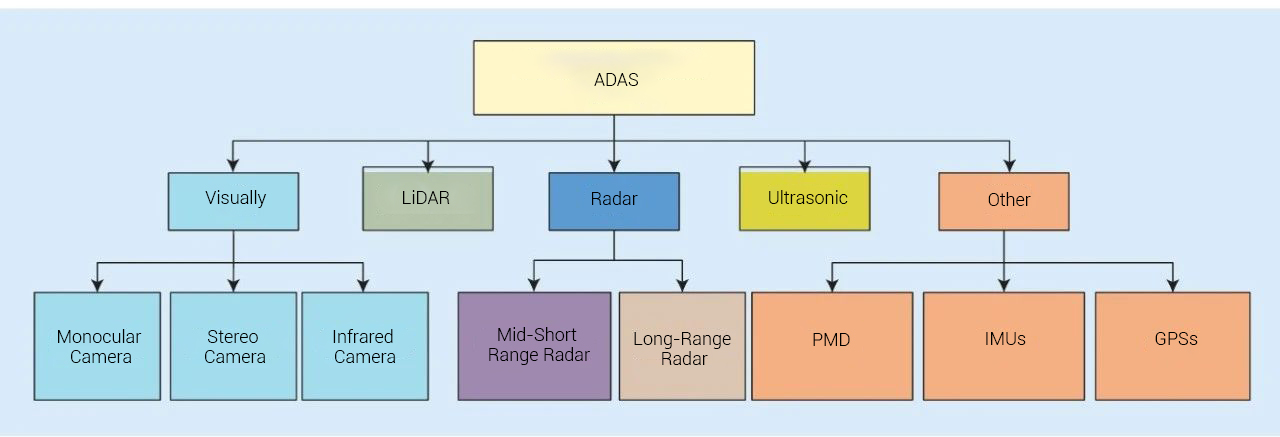
Vision sensors have become a mainstream solution due to their cost-effectiveness and information richness:
Monocular camera estimates the distance through feature point matching, but the ranging error is up to 10%-15%; binocular camera uses parallax to generate 3D point cloud, with a ranging accuracy of ±5 cm; infrared camera penetrates rain and fog through active near-infrared light source or thermal imaging to make up for the performance blind spot of visible light camera.
Among the non-visual sensors, millimeter-wave radar (24GHz/77GHz) achieves long-distance detection of more than 150 meters, with a speed error of less than 0.5 m/s; LiDAR reduces its size to less than 100cm³ through solid-state technology, but the effective detection distance plummets to 50 meters in heavy rain and fog; ultrasonic sensors achieve obstacle detection within 5 meters at low cost, and are widely used in automatic parking systems.
Algorithmic process, vision-based ADAS system captures images at 30-60fps frame rate, and after de-noising and color enhancement pre-processing, deep learning models such as YOLOv8 and Faster R-CNN have an accuracy of more than 97% for detecting pedestrians and vehicles under complex lighting, and combined with Kalman filtering to predict the motion trajectory.
Monocular vision estimates the distance by Monodepth2 model, binocular vision directly generates the depth map, and finally the control module fuses the multi-source data and outputs braking and steering commands with less than 50ms delay.
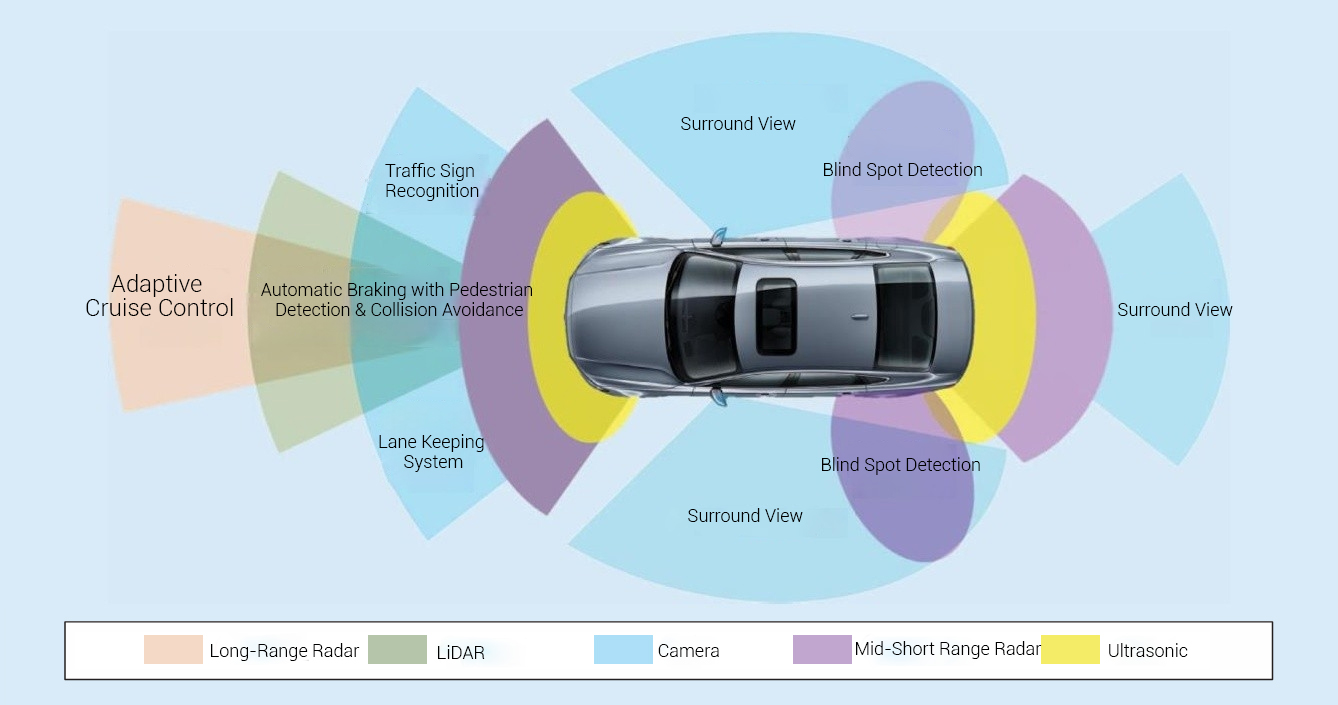
3. Building a full-scene security protection network
In the field of outdoor active safety, ADAS forms a synergy of three types of functions: warning, control and interaction. The lane departure warning system recognizes lane lines through Canny edge detection, which can reduce one-way departure accidents by 23%; the blind zone monitoring system combines radar and camera data to reduce the risk of lane change collision by 40%.
Adaptive Cruise Control maintains a safe distance of 1.5 seconds, and Automatic Emergency Braking avoids 85% of rear-end accidents at a speed of 60km/h and within a distance of 10 meters. Traffic sign recognition system achieves 95% accuracy in good lighting, and panoramic image system realizes 360° surround view through 4 fisheye cameras to shorten parking time by 60%.
For driver status monitoring, the infrared camera captures eyelid closure frequency and head posture, and when PERCLOS > 0.8 or vision deviation from the road for > 2 seconds, the response time is reduced to 1.2 seconds through multi-modal feedback, which improves efficiency by 30% compared with traditional auditory alerts.
Data from the U.S. National Highway Traffic Safety Administration shows that such systems can effectively prevent 80% of accidents caused by distraction or fatigue.
4. Next-generation ADAS towards autonomous driving
Sensor fusion technology integrates multi-source data through Kalman filtering, vision and radar fusion solves the problem of rain and fog environment detection failure, LiDAR and IMU cooperate to improve the accuracy of dynamic field attraction cloud alignment, so that the target positioning error is reduced to less than 0.1 meters, and the leakage rate is reduced from 15% to 3%.
Vehicle-to-Guideway Collaboration (V2X) realizes traffic light phase synchronization and road condition sharing through DSRC/C-V2X protocol, and the delay of collaborative decision-making is reduced from 100ms to 30ms, and reduces the number of start-stop by 30%.
According to SAE standards, ADAS covers L0-L2 level of driver assistance, L3 level system such as Tesla Autopilot needs to be taken over by the driver within 10 seconds, L4 level system such as Waymo realizes unmanned takeover in a limited area at the level of 1,000 kilometers, and L5 level has not yet been commercialized due to the limitations of decision-making capability in extreme scenarios.
5. Breaking through multidimensional bottlenecks in technology deployment
In terms of environmental adaptability, strong light and rainstorms lead to a visual detection rate of less than 70%, and LiDAR performance decreases within 50 meters of visibility.
Dynamic sensor switching and data enhancement technology can maintain the detection accuracy of complex conditions at more than 92%. The balance between computing power and power consumption needs to rely on CPU+GPU+NPU heterogeneous architecture, with the goal of controlling the typical power consumption within 20W and meeting the ASIL-D safety level.
Network security requires the deployment of AES-256 encryption and intrusion detection system to achieve 98% identification rate of abnormal traffic. Globalization deployment requires adapting different traffic signs through meta-learning technology to maintain more than 90% cross-regional detection accuracy
ADAS is shifting from functional module integration to systematic innovation, and the vision-led multi-sensor fusion solution has supported the scale application of L2+ level functions.
In the next ten years, after the cost of solid-state LiDAR is reduced to about 3,500 yuan and the coverage rate of vehicle-circuit coordination breaks through 60%, ADAS will accelerate its advancement to L3-L4 level. Its ultimate value not only lies in improving safety and efficiency, but also reconstructing the interaction relationship between human and vehicle environment, providing core support for the smart city, and promoting the transportation system towards the vision of “zero accident”.
- A Comprehensive Overview of the Evolution of Parking Assistance Systems2025-07-10
- Revolutionize Your Vision: Next-Gen Wireless Camera Systems & Forklift Safety Solutions Launched2025-07-08
- Smart Cockpit ADAS Core Technology Architecture and Safety System Evolution2025-04-21
- Intelligent Cockpit ADAS and HUD Convergence System Design2025-04-18
- AI Camera Systems: Revolutionary Technology for the Trucking Industry2025-02-12
- Smart Cockpit HMI Design and Driving Safety2025-01-17